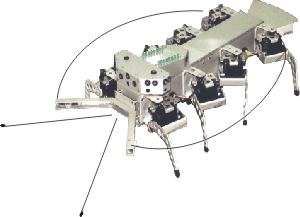
生物型ロボットは、人間が入ることのできない狭い空間や、危険な場所での作業を行うために使われます。例えば、地震やテロにより壊れた建物の中に閉じ込められた人の安否確認や、地雷の発見などに利用されることが期待されています。したがって、平坦ではない地面をいかに効率よく歩行することができるかが問題となります。さらに、野外での作業においては、内部に格納された電池のみに頼らなければならないので、消費電力をなるべく少なくした歩行方法が求められています。
そこで、本研究室では、以下の点についての研究を行っています。
実際には、遺伝的アルゴリズムを用いて、最適な歩行方法の実現を探っています。
以下に実験の動画があります。