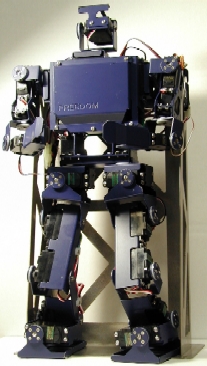
本研究室では、二足歩行ロボットの製作とその制御を行っています。下記に、最近導入した二足歩行ロボットがあります。音声認識、音声合成、画像認識、動作制御などが行えます。
上記のロボットHOAP3の詳細はこちらにあります。
小型の二足歩行ロボットにおいては、将来的にはロボットによる格闘競技大会ROBO-1への参加を検討しています。
二足歩行ロボットの歩行実験1 二足歩行ロボットの歩行実験2 二足歩行ロボットの障害物回避実験