多くの実システムは、非線形システムです。しかし、制御理論は、線形システムを対象に発展しています。これは、ひとえに線形システムの数学的な取り扱い易さによるものです。最近、ファジィ理論を用いて、線形システムを拡張したファジィシステムが注目を浴びています。ファジィシステムは、非線形システムを(線形システムと比べて)よりよく近似したり、あるクラスの非線形システムを厳密に表現することができます。また、ファジィシステムは非線形システムであるにもかかわらず、数学的な取り扱い易さより、ファジィシステムに対する制御理論の展開がなされています。
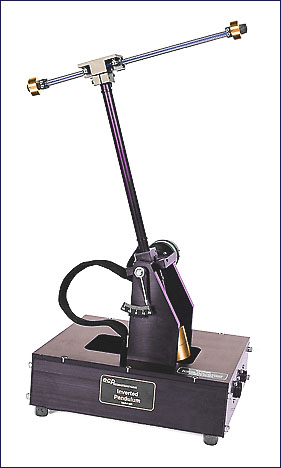
そこで、本研究室では、ファジィシステムを用いて非線形システムを近似もしくは厳密に表現し、そのシステムに対する制御理論を構成することを考えています。利用システムは、以下に示す倒立振子システムです。ここに示した倒立振子システムも非線形システムの一つです。倒立振子システムは単純な構造を持つシステムですが、制御が困難であるシステムの一つです。二足歩行ロボットの歩行制御の基礎研究などにも使われています。
以下に、実験結果(動画)を示します。